"日 따라잡자" 맨땅 출발 15년만에… 한국, 最强 로봇일꾼 만들다
- 기사
- 100자평(12)
[재난수습 로봇 국제대회서 우승한 KAIST팀 휴보]
운전·밸브 닫기 등 8개 과제 수백m 밖서 무선조종해 수행
약했던 사물인식 능력 개선… 유연한 상황 대처 가능해져

 6일(현지 시각) 미국 캘리포니아주 포모나 전시장에서 열린‘로봇공학 챌린지(DRC)’대회에서 오준호 교수(상금 팻말 든 사람)가 이끄는 KAIST 팀이‘DRC 휴보2’로봇으로 우승해 상금 200만달러(약 22억원)를 받았다. /포모나(캘리포니아)=박건형 기자
6일(현지 시각) 미국 캘리포니아주 포모나 전시장에서 열린‘로봇공학 챌린지(DRC)’대회에서 오준호 교수(상금 팻말 든 사람)가 이끄는 KAIST 팀이‘DRC 휴보2’로봇으로 우승해 상금 200만달러(약 22억원)를 받았다. /포모나(캘리포니아)=박건형 기자
결선 대회장은 실제 후쿠시마 원전 사고 현장을 본떠 만들어졌다. 각 로봇에는 ▲차량 운전 ▲차량 하차 ▲문 열고 들어가기 ▲밸브 닫기 ▲벽에 구멍 뚫기 ▲콘센트 꽂기 ▲장애물 치우기 ▲계단 오르기 등 8가지 과제가 주어졌다. 참가팀들은 대회장에서 수백m 떨어진 곳에서 제한된 속도의 와이파이(무선랜) 통신으로만 로봇을 조종해야 했다. 로봇의 눈을 통해서만 현장을 파악할 수 있고, 그나마 통신도 자주 끊기기 때문에 만일의 경우 로봇이 스스로 상황을 판단해 정해진 과제를 수행하는 인공지능(AI) 기능도 필요했다.
지난해 예선에서 휴보는 안정적으로 걷는 능력은 세계 최고 수준이지만, 사물을 인식하는 능력은 미국과 일본 기업들에 다소 뒤지는 것으로 나타났다. 이를 개선하기 위해 이미지 전문가인 KAIST 권인소 교수(전기 및 전자공학부)가 휴보팀에 합류했다. 권 교수는 "오 교수가 '심 봉사(휴보) 눈 좀 뜨게 해달라'고 해서 함께 휴보 제작에 참여했다"면서 "주변 사물을 좀 더 구체적이고 명확하게 인지할 수 있도록 시각처리 시스템을 바꾼 뒤 휴보의 행동 속도나 움직임이 대폭 개선됐다"고 말했다. 드릴을 잡고 스위치를 켜거나 밸브를 정확히 잡아 돌릴 수 있는 '밝은 눈'을 달아준 것이다.
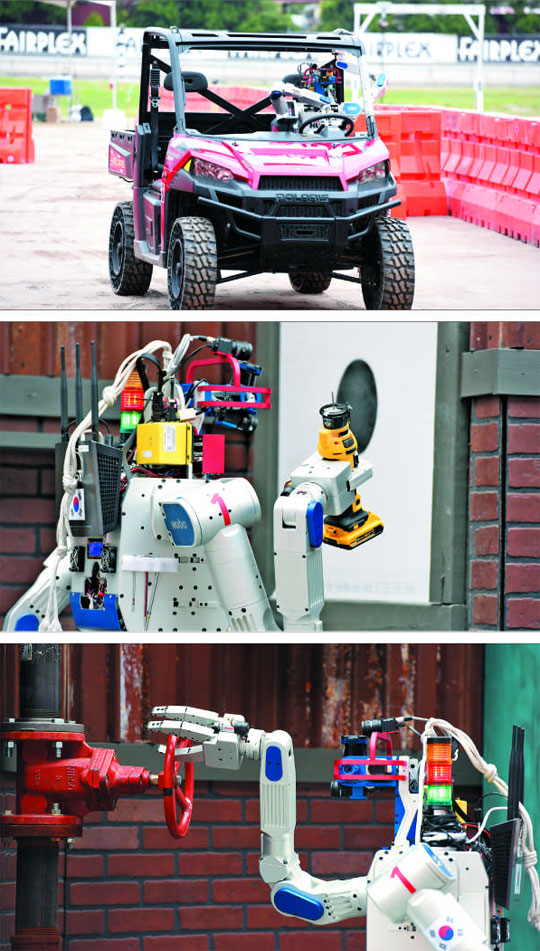
- 운전하고… 벽 뚫고… 밸브 잠그고… - 6일(현지 시각) 미국 캘리포니아주 포모나 전시장에서 열린‘로봇공학 챌린지(DRC)’결선에서 KAIST팀의‘DRC 휴보2’로봇이 차량을 운전해 가상 재난 지역으로 진입하고, 드릴로 벽을 뚫고, 밸브를 손으로 돌려 잠그는 등(사진 위에서부터) 8가지 임무를 완벽하게 수행해 우승을 차지했다. /DARPA 제공
3위를 차지한 '타르탄 레스큐'를 제작한 미국 카네기멜런대의 토니 스탠츠 교수는 "휴보가 주변 환경에 따라 유연하게 대처하는 모습이 인상적이었다"면서 "참가팀 중에서 가장 재난 현장에 적합한 로봇을 구현해냈다"고 평가했다. MIT의 한 연구원은 "일본만 경쟁자라고 생각했는데 이제 한국도 동등하게 봐야 할 것 같다"고 말했다.
이번 대회 결승에 진출한 24개팀 중 8개팀이 한국산 로봇 본체나 부품을 사용했다는 점도 의의가 크다. 독일 본대학팀은 한국 로봇기업 '로보티즈'가 개발한 액추에이터(구동장치)를 사용해 4위에 올랐다. 미국 라스베이거스 네바다대팀도 휴보에 독자 소프트웨어를 적용해 8위를 차지했다. 이 대회에서 6개팀에 로봇을 공급한 로보티즈 김병수 대표는 "역사가 오래된 산업용 로봇 시장은 일본이 장악하고 있지만 한창 기술 발전이 이뤄지고 있는 인간형 로봇이나 교육용 로봇 분야는 한국이 선점할 수 있다"고 말했다.
지나치게 단기 성과에만 집착하면 안 된다는 지적도 있다. 저명한 로봇 전문가인 데니스 홍 UCLA 교수는 "로봇이 실질적으로 사람에게 도움이 되는 미래 산업으로 성장하려면 꾸준한 연구와 투자가 필요하다는 점을 잊어서는 안 된다"고 조언했다.






 크게
크게




[출처] 본 기사는 조선닷컴에서 작성된 기사 입니다
No comments:
Post a Comment
Note: Only a member of this blog may post a comment.